UniDex: A Robot Foundation Suite for Universal Dexterous Hand Control from Egocentric Human Videos
Gu Zhang, Qicheng Xu, Haozhe Zhang, Jianhan Ma, Long He, Yiming Bao, Zeyu Ping, Zhecheng Yuan, Chenhao Lu, Chengbo Yuan, Tianhai Liang, Xiaoyu Tian, Maanping Shao, Feihong Zhang, Mingyu Ding, Yang Gao, Hao Zhao, Hang Zhao, Huazhe Xu
Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2026
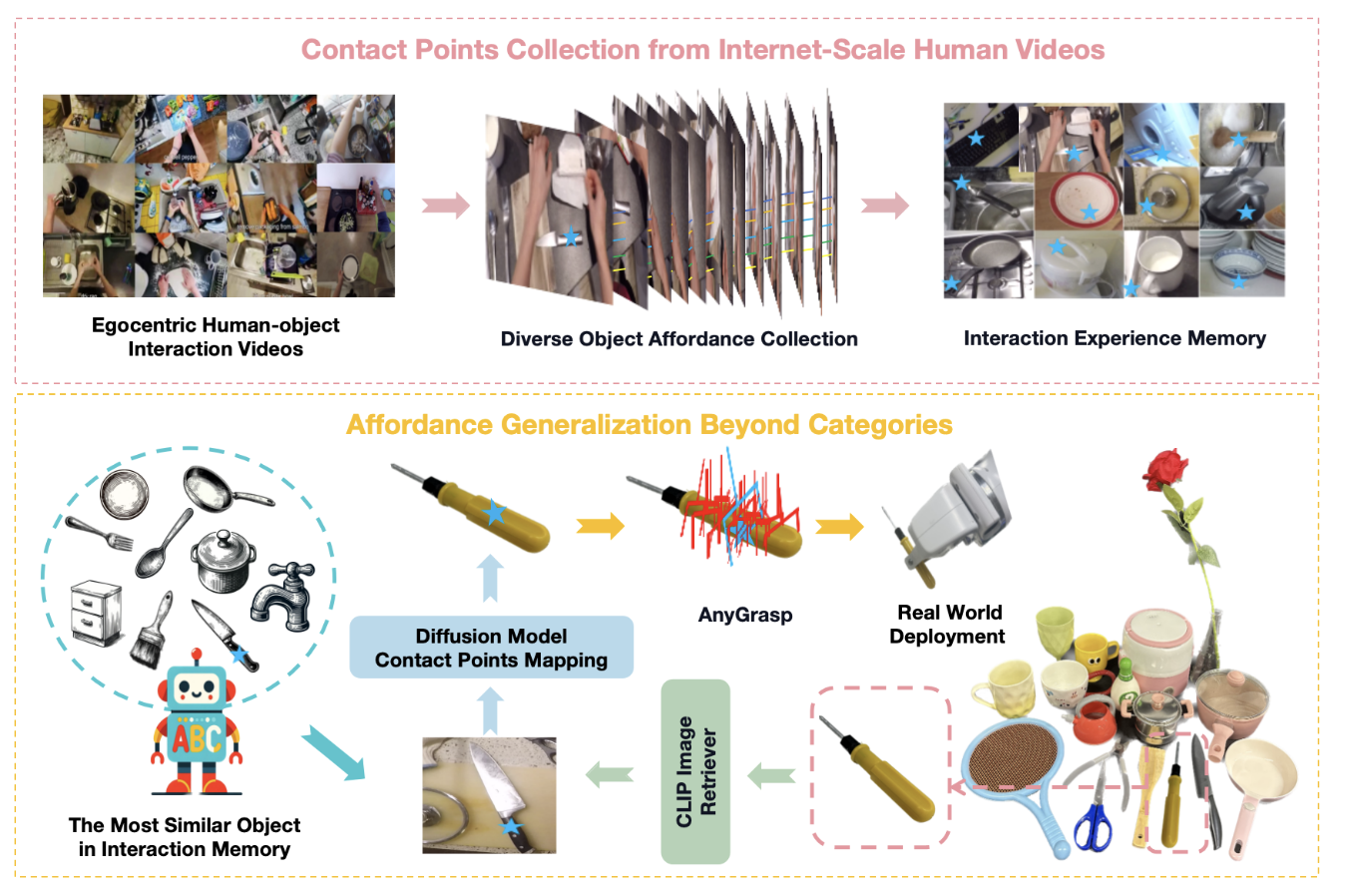
UniDex is a robot foundation suite to construct large-scale robot data from egocentric human videos, and a vision-language-action policy for universal dexterous hand control.



{kind=link}